-


Clamp-end traverse type robot for 3-plate mold that releases molded parts to the movable platen side of the IMM
The CT and CT2 transition the former design concept of take-out robots as tools for replacing line operators to the starting point for automating part take-out. Developed from this new concept, these take-out robots provide users with the impetus to completely change the layout of their entire plant. -
Robots that have the future interests of the molding industry in mind
It used to be a dream that vast numbers of people could use the same product and similarly enjoy the same benefits. Then, plastic engineering miraculously made that happen. Since the advent of injection molding, industry has incessantly pursued better products of better quality at a faster clip. The merits of injection molding have been amplified by the take-out robot. But, molding plants have never been without issues – highly complicated products, small lot wide variety production, labor shortages and inherent dangers of the workplace -- to name a few. Yushin’s purpose is to make robots that help solve these issues. Moreover, Yushin goes another step further by making robots that have the future interests of the molding industry in mind. That mindset spawned the FRA series.Compliant with the most stringent international safety regulations as a standard feature
Safety circuits There is no compromising at Yushin when it comes to safety. As the bottom-line, redundant safety circuits maintain functional capacity in the unlikely event that a primary circuit goes down.
Speed monitoring Robot movements are monitored during teaching so that safe speeds are not exceeded and jobs can be performed safely. Compliant with international safety standards Our FRA robots qualify as Safety Category 3 devices under EN/ISO 12100, EN 60204 and EN/ISO 10218, and comply with safety requirements under CE, GB and KCs.Another step closer to “no downtime”
INTU LINE IoT service Included with every FRA robot, this software application gives users immediate intuitive control over their new robot on the very same day it is installed.
Read more on how you can setup a 'lights out' production facility....
Production monitoring Intu Line displays production counts, uptime ratios, operating statuses, cycle times, error tallies, short stoppage logs and visuals of production floors, which users can easily view anytime, anywhere from a smartphone or PC. It visualizes molding operations in terms of short stoppage frequency and duration, which was difficult to grasp before. Troubleshooting If trouble occurs, Intu Line shares the customer’s error information with Yushin over an IoT system. It’s like having a Yushin service rep on-site as customers are spared the hassles of explaining what happened, which logically leads to quicker solutions.
INTU LINE - Yushin IoT Solution Service brochure
-

Reliable Stability with Compact Body
Swing type runner take-out robots have evolved alongside Yushin’s history as a business. HOP Five models house the transformer and control board in the robot body, instead of using standalone units of the past, and yet they require less installation space. Moreover, these robots are built so that principle adjustments like kick stroke can be made at the operator side of the molding machine, which makes production setup more efficient. -

Why is a several hundred kilogram robot needed to pick a molded part of just a few grams?
To answer this question, Yushin sought an application-specific robot through its Optimum Design approach. Design Optimization is what Yushin calls its use of CAE (Computer—Aided Engineering) to determine the theoretically best configuration of a robot based on its mechanisms and movements, rather than relying solely on designer experience. This approach has been used in recent years to make aircraft and automobiles lighter and more reliable. Curiously enough, we have often been amazed by how closely optimized designs resemble trees and animals in the natural world. Designed to deliver speeds and safety unachievable with predecessor models, we are confident that the HSA series will usher in a new era in take-out robots. The HSA incorporates Design Optimization for higher speed and rigidity with less weight. With take-out times as fast as 0.32 sec proven during live molding, the HSA is 13% lighter and 11% faster than previous models (measurements are relative to previous comparable model). -
Improved productivity via high speed + vibration control
HST robots bring to the table the tools and means for improving productivity in the form of high-speed operation and thorough vibration controls. Higher speeds have been achieved by employing Optimum Design approach to reduce the mass of moving parts, while the enhanced vibration dampening of the CFRP arm combines with anti-vibration measures to shorten settling time. Optimum Design Joint research with Kyoto University Optimum Design is what Yushin calls its use of CAE (Computer—Aided Engineering) to determine the theoretically best configuration of a robot based on its mechanisms and movements. This approach has been used in recent years to make aircraft and automobiles lighter and more reliable. Through joint research conducted with Kyoto University, Yushin first tested and applied CAE to an EOAT. Following the good results, this Optimum Design approach was employed with take-out robots of the HSA, TSXA, YC and HST series. Winner of the JSME Technology Award Great reviews in engineering circles In 2011, Yushin was honored with the prestigious Technology Award of the Japan Society of Mechanical Engineers (JSME) for “developing high-performance take-out robots for molding machines by structural optimization”. -

LA series: Large Take-out Robots
For reliable take-out of very large molded products such as automobile parts and housing materials
For reliable take-out of very large molded products such as automobile parts, housing equipment parts and other large molded articles from ultra-large molding machines With its high mechanical rigidity, it stably takes out heavy articles. The LA series come with the easy-to-use E-touch compact controller as a standard feature. It is a standard take-out robot of great cost-performance. -
Developed for ultra-small molding machines, miniHOP-G 300
In order to work with the smallest class of injection molding machines made by various manufacturers, the miniHOP-G 300 is, despite its small size, designed and built with high performance in mind e.g., high-speed stability, maintenance-free operation and more. -
NEW Yushin Product!
Powerful Selection of Standard Features
Powerfully automate extraction of large, heavy molded parts such as automobile parts, housing appliances, and parts for industrial equipment. The MKA-2000S can handle payloads of up to 50 kg (including the end-of-arm tool) and stably take out ultra-large molded articles. The MKA-2000S robot features a 3-axis, Cartesian style traverse robot with a movable kick beam and a 2-stage telescopic vertical arm. The long rigid, steel traverse beam is adjustable up to 5000mm, with a horizontal reach of 1800mm and a telescopic Arm with vertical strokes up to 3000mm. The MKA-2000S robot works on machines of 1500 molding tons or larger. In addition to the 3-axes motion, a servo AC or BC wrist unit can be added, allowing for additional articulatory movements for complex EOAT motion. Two types of servo-powered wrist units are available as an option, enabling precision control and motion comparable to an articulated 6-axis robot. The MKA robot can lift up to 50kg. The MKA-2000S has been tested and proven to exceed its previous larger counterparts like the RBII-2500S with shorter take-out times by 17%. The low profile design of the MKA allows for work envelopes with lower overhead clearance. It’s superior vibration damping during movement and stops helps ensure stable and shorter cycle times by 10%, compared to previous larger models. -
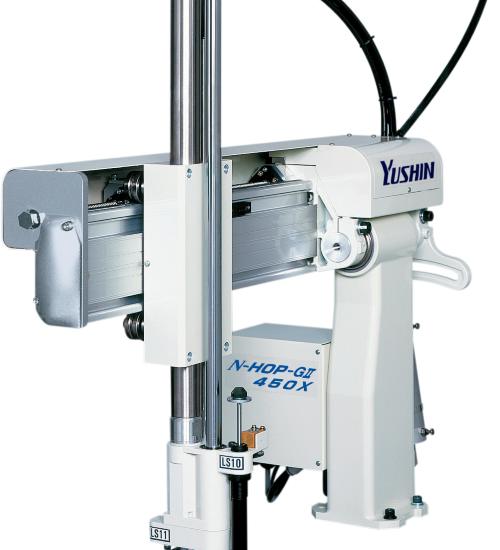
Runner take-out robot with servo driven kick axis
With swing-type take-out robots, the parameter that is most often adjusted when setting up production is the kick stroke. But, the N-HOP-GII employs an NC servo-driven kick axis, so adjustments can be made safely and assuredly from the controller without touching the molding machine. Moreover, servo control means that runners can be stably taken out at high speed. -
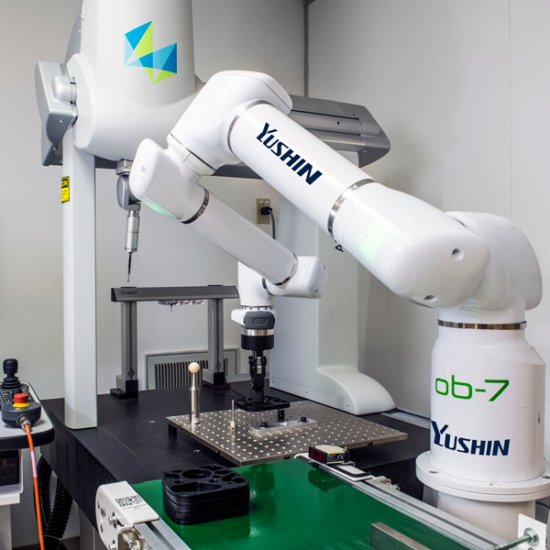
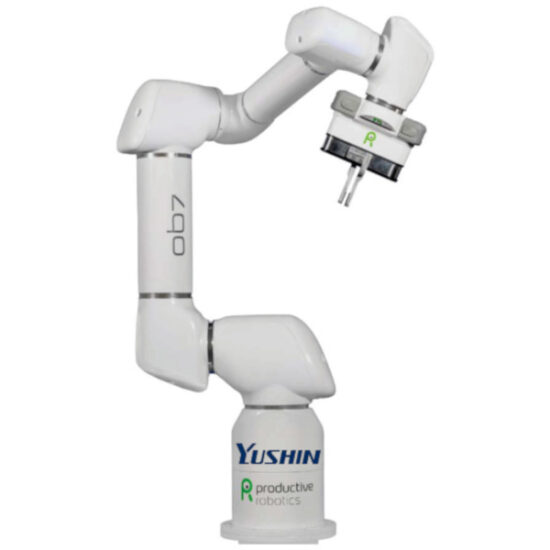
Collaborative Automation is now within your Grasp
OB7 was designed to deliver unmatched automation productivity, accuracy, and safety. And, you can do it all simply without complicated software programming and coding. OB7 Learns with no programming If you can do the job, you can show OB7 how to do the job. Learning without programming means that anyone can teach OB7 to do hundreds of complex automation jobs simply and quickly. Next generation collaborative & safe OB7 is the next generation of collaborative robots, with new functionality and systems designed to reduce costs and safely open new productivity horizons. OB7 is fully compliant with ISO 10218-1, work safely guidelines and requirements. When equipped with safety sensors, OB7 can safely work at high speeds when people aren’t present then slow to safe speeds when people are nearby. Automate all areas of manufacturing- Machine Tending and Batch Production
- Packaging and Palletizing
- Loading, Unloading and Part Removal
- Gluing, Painting and Welding
- Polishing, Cutting, Deburring and Grinding
- QC Measuring, Testing, and Inspection
-
NEW Yushin Product!
Space-saving palletizing robot used at packing and distribution sites
Yushin developed the space-saving palletizing robot "PA" series for plastic injection molding industry. Palletizing robots are available not only in the manufacturing industry but are now a product for the market where rapid automation is required due to labor shortage at distribution sites. The technical capabilities cultivated up to this point will be utilized. This "PA" series is the "PA-20", which supports a payload of 20 kg, will meet a wide range of customer needs by offering a lineup of two models of the "PA-40" that support the same 40 kg. New product features: The PA palletizing robot contributes to solving labor shortages in the manufacturing sector by automating various applications in the field: Space-saving designs adds flexibility to production lines Reduction of installation space that maximizes the advantages of Cartesian robots and placement around the cantilever structure with few columns ensures the freedom of layout. The minimal footprint creates fewer obstacles for conversion, and the limited space can be effectively used. Easy and quick introduction The easy operation of the touch panel, which has been highly evaluated in the molding industry, inherits a safe operation that is easy to understand. In addition, the design of the optimum robot hand and the spread throughout the country. With quick production line start-up and maintenance, such as speedy response by service bases Providing such a soft side. -
The Environmentally friendly RC-SE take-out robot series with Smart ECO Vacuum Function
The newly released RC-SE high-speed take-out robot is equipped with Yushin’s new Smart ECO Vacuum function that has been developed to greatly reduced air consumption during the molding process. The new RC-SE series includes a wide range of devices for target injection molding machines with a clamping force of between 30 and 1,300 tf (tons) to meet various customer needs.New product features:
Smart ECO Vacuum for Reduced Air Consumption The RC-SE series adopts Yushin’s original ECO Vacuum™ technology for reduced air consumption. Constant suction pressure monitoring ensures optimal vacuum start timing with up to a 78% reduction in air consumption. This helps reduced both electricity and equipment costs related to air compressors. Long Life Mode Take-out robot drive speed is automatically adjusted according to the molding cycle, reducing the amount of power being used (5% reduction according to in-house testing measurements). This also helps extend the service life of the guide shaft and timing belt for even greater reductions in running costs. Improved Productivity As with Yushin’s flagship FRA series, the RC-SE optimizes vibration control on all axes for superior performance in various molding environments while predictive maintenance also helps minimize downtime. These and other factors all contribute to long-term improvements in customer productivity.























Yushin America, Inc.
USA Corporate Headquarters
35 Kenney Drive, Cranston, RI 02920
Phone: (401) 463-1800
Email: [email protected]