The 4-axis robot arm sits squarely in that gap. Not as complex as a 6-axis system, not as limited as a 2- or 3-axis machine — it's the configuration that dominates pick-and-place lines, palletizing cells, packaging operations, and injection molding part extraction worldwide. According to the IFR World Robotics 2025 report, the global operational stock of industrial robots reached 4,663,698 units in 2024, up 9% year over year — a figure driven substantially by exactly these kinds of structured, repetitive-task deployments.
This article covers how each axis functions, the three main 4-axis configurations, real-world applications, and how 4-axis systems compare to 6-axis robots — so you can match the right tool to the job.
Key Takeaways
- A 4-axis robot arm has four independent degrees of freedom: base rotation, lower arm extension, upper arm reach, and wrist rotation
- SCARA, delta, and articulated configurations each suit different speed, payload, and application requirements
- 4-axis robots outperform 6-axis systems on speed and payload capacity for structured, repetitive tasks
- Injection molding part extraction demands precise timing and consistent part orientation — making it a core 4-axis use case
- When tasks involve multi-angle approaches or irregular part orientations, 6-axis systems are the better fit
What Is a 4-Axis Robot Arm?
A 4-axis robot arm is an articulated machine with four independent joints, each driven by its own motor. Each joint adds one independent direction of motion — reach, extend, position, orient — giving the robot what engineers call four degrees of freedom.
Those four degrees let the arm move in three spatial directions and rotate its end-effector (the gripper or tool at the tip) without repositioning the entire arm.
Wrist rotation is what separates a 4-axis robot from simpler 2- or 3-axis machines. It lets the robot place a part in a specific orientation without executing a full repositioning move — a meaningful cycle-time advantage in high-speed production.
Compared to 6-axis systems, 4-axis robots are simpler, faster on defined motion paths, and structurally capable of handling heavier loads. The trade-off is reduced flexibility for complex, multi-angle tasks.
Common Types of 4-Axis Robots
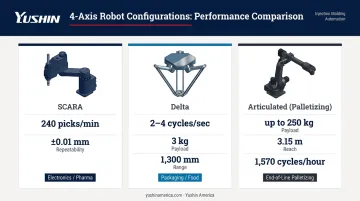
Three configurations dominate the 4-axis market:
- SCARA: Fast horizontal movement in the X-Y plane; the Stäubli TS2 reaches 240 picks/minute at ±0.01 mm repeatability, making it a fit for electronics assembly and pharmaceutical handling
- Delta: Overhead parallel-arm structure for high-speed light-load pick-and-place; the Yaskawa MPP3H runs 2–4 cycles/second with a 3 kg payload across a 1,300 mm range
- Articulated 4-axis (palletizing): Built for heavy loads; the ABB IRB 660 handles 180–250 kg at 3.15 m reach, running up to 1,570 cycles/hour for stacking cases, bags, and bottles
How the Four Axes of a Robot Arm Work
Understanding each axis individually makes it easier to see why the coordinated combination handles so many industrial tasks effectively.
Axis 1 — Base Rotation This is the foundation. The entire arm rotates left and right from a fixed base, typically sweeping up to 180 degrees (and up to 220 degrees in extended configurations, per the ABB IRB 660 specification). This rotation repositions the robot across its horizontal workspace without moving the base itself.
Axis 2 — Lower Arm / Shoulder Movement Sets the reach radius for any given task. This axis drives the lower arm forward and back in a broad arc, determining how far the robot extends from its base and how high or low it positions the upper structure before the elbow and wrist take over.
Axis 3 — Upper Arm / Elbow Movement Controls the upper arm segment to position the wrist above or below the midline — reaching into a mold cavity, lowering to a conveyor, or lifting clear of an obstacle — expanding the effective working envelope.
Axis 4 — Wrist Rotation Housed at the wrist joint, this axis rotates the end-effector without moving the rest of the arm. A freshly extracted injection-molded component can be flipped from horizontal to vertical for conveyor placement; a packaged product can be reoriented for palletizing — all without repositioning axes 1 through 3.
Coordinated Motion in Practice
The real capability emerges when all four axes move simultaneously. A controller sends signals to each motor in real time, while onboard sensors provide position feedback so the arm executes precise, repeatable movements cycle after cycle.
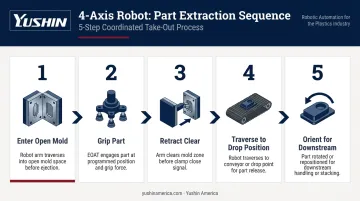
In injection molding part extraction, that real-time coordination directly affects yield. Each cycle follows the same sequence:
- Enter the open mold without contacting the tool
- Grip the part at the correct position and force
- Retract clear of the mold before clamp close
- Traverse to the drop or conveyor position
- Orient the part for downstream handling
Any deviation at one axis ripples through the rest of the sequence, causing misloads, part damage, or machine faults. When all four axes execute as a single coordinated move — not a step-by-step chain — cycle time stays consistent and downstream errors stay close to zero.
Key Applications of 4-Axis Robot Arms
Pick-and-Place Operations
Four degrees of freedom cover exactly the movements pick-and-place tasks require: reach, extend, position, orient. Nothing more, nothing less. FANUC's packaging systems can coordinate multiple robots picking and packing up to 2,000 items per minute on a single line — a throughput figure that would be difficult to achieve with the added coordination overhead of a 6-axis system on the same task.
Palletizing and Material Handling
Articulated 4-axis robots are the standard choice for end-of-line palletizing. Their simplified axis structure allows for greater structural rigidity, which translates directly into payload capacity that 6-axis designs of comparable size struggle to match. The FANUC M-410iC/315, for example, carries 315 kg at 3,143 mm reach at ±0.05 mm repeatability.
Typical payload benchmarks for industrial 4-axis palletizing robots:
| Model | Payload | Reach |
|---|---|---|
| FANUC M-410iC/110 | 110 kg | 2,403 mm |
| FANUC M-410iC/315 | 315 kg | 3,143 mm |
| ABB IRB 660 | 180–250 kg | 3,150 mm |
| Yaskawa MPL300II | 300 kg | 3,159 mm |

Packaging and Food/Pharma Automation
The IFR recorded 20,792 industrial robot installations in food and beverage alone in 2024. Delta robots with IP69K, USDA, and FDA ratings handle primary food packaging at wash-down speeds; SCARA systems process pharmaceutical capping at up to 120 units per minute in controlled environments.
Both requirements — speed and hygiene compliance — are met without the cleaning surface area and programming overhead that additional wrist axes would introduce.
Assembly Line Tasks
Beyond high-volume packaging, 4-axis robots handle precision work at the component level. SCARA-style configurations are used throughout electronics, automotive, and medical device assembly for inserting, joining, and orienting small components. Their horizontal-plane strength and sub-millimeter repeatability make them well-suited for tasks that don't require approaching parts from above or around obstacles.
Plastic Injection Molding Part Take-Out
This is one of the most specialized 4-axis applications. The robot must enter an open mold during a narrow time window, extract a freshly molded part at exact position, retract cleanly, and deposit the part in a defined orientation. Cycle times can run faster than five seconds.
Yushin America's take-out robots are engineered specifically for this application. Their standard series (YD/YD2, HST, HSA) are 3-axis Cartesian systems (X traverse, Y kick/downstroke, Z vertical) with an optional rotational servo wrist that adds a fourth axis for part reorientation. When that wrist is added, the result is true 4-axis capability built around the injection molding environment:
- Purpose-built controller logic that syncs directly with the IMM cycle
- HX/SoftStop motion algorithms that minimize in-mold dwell time
- EOAT interfaces designed for hot, dimensionally sensitive plastic parts
For plastics manufacturers, this purpose-built approach matters. A general-purpose 4-axis industrial robot can be programmed to extract parts, but it lacks the native IMM cycle synchronization and chase-time-optimized motion profiles that define Yushin's lineup.
Advantages of 4-Axis Robots in Industrial Settings
Three factors make 4-axis robots the default choice for high-volume, defined-motion industrial tasks: speed, payload capacity, and total cost of ownership.
Speed and cycle time — Fewer axes means a simpler kinematic chain, and simpler chains move faster on repetitive paths. The FANUC M-410iC/110 runs 2,200 cycles per hour — a throughput rate that 6-axis systems struggle to match on palletizing and pick-and-place tasks that don't require full articulation.
Payload range — Structural simplicity translates directly into load capacity without losing repeatability. 4-axis robots span a wide spectrum:
- Light SCARA systems: 3–10 kg (small-part assembly, electronic component handling)
- Mid-range palletizing robots: 50–150 kg (case and carton stacking)
- Heavy palletizing robots: 500+ kg (industrial bulk material handling)
That range covers the majority of manufacturing material handling needs.
Cost and integration — According to Assembly Magazine, SCARA robots cost less than six-axis robots of comparable size and payload due to their simpler mechanical design. That price difference carries through the project lifecycle: programming is more straightforward, commissioning takes less time, and ongoing maintenance is less complex.
Limitations to Consider
Restricted Range of Motion
Four axes cannot approach a part from multiple angles, reach around obstacles, or handle workpieces in unpredictable orientations. Tasks that require true spatial flexibility — welding complex joint geometries, finishing irregular surfaces, or manipulating parts that arrive in variable orientations — typically need five or six axes.
Defined Work Envelope from a Fixed Base
A 4-axis robot operates within a defined zone from its mounting point. It's built for structured, repetitive tasks in that zone — not flexible, free-roaming applications.
For situations where the working envelope needs to expand, adding a linear track or external axis can extend effective reach. Some large-format robots address this through native mechanical design instead — the MKA-2000S, for example, offers an adjustable traverse beam up to 5,000 mm, eliminating the need for external track add-ons.
4-Axis vs. 6-Axis Robots: Which Is Right for You?
Flexibility vs. Speed Trade-Off
Six-axis robots replicate the full range of a human arm — three positional axes plus three wrist axes — making them the right choice for welding, painting, and intricate assembly where the robot must approach from multiple angles or handle parts in irregular orientations.
Four-axis robots win on speed, structural load capacity, and simplicity when the motion path is defined and repetitive. A McKinsey analysis of manufacturing automation found that companies implementing high-speed automated packaging lines saw productivity improvements exceeding 70% in processing areas and nearly 280% in filling and packaging. Those gains came from high-throughput, structured-task automation — precisely where 4-axis systems are built to perform.
How to Choose
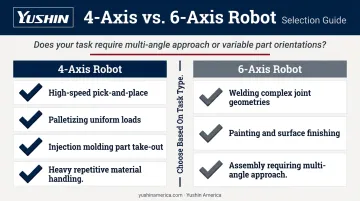
The decision comes down to one question: Does your application require approaching the part from multiple angles, or handling workpieces in unpredictable orientations?
| Application Type | Better Choice |
|---|---|
| High-speed pick-and-place on defined path | 4-axis |
| Palletizing uniform loads | 4-axis |
| Injection molding part take-out | 4-axis (purpose-built) |
| Welding complex joint geometries | 6-axis |
| Painting or surface finishing | 6-axis |
| Assembly requiring multi-angle approach | 6-axis |
| Heavy repetitive material handling | 4-axis |
If the task is defined, repetitive, and doesn't require approaching parts from arbitrary angles, a 4-axis robot is consistently the faster, more economical, and structurally superior choice.
For plastics manufacturers evaluating injection molding automation, Yushin America's 50+ years of experience means the axis configuration question gets answered through application-specific engineering. Their team assesses press tonnage, cycle time targets, part geometry, and downstream requirements to identify the right robot architecture for your cell.
Frequently Asked Questions
What is a 4-axis robot?
A 4-axis robot is an industrial robotic arm with four independent joints that allow movement in three spatial directions plus rotation of its end-effector. This configuration suits pick-and-place, palletizing, packaging, and injection molding part extraction — tasks with defined, repetitive motion paths.
What is the difference between 4-axis and 6-axis robots?
Four-axis robots offer faster cycle times, higher payload capacity, and simpler programming for structured tasks. Six-axis robots provide the flexibility to approach parts from any angle and handle irregular orientations, making them better suited for welding, painting, and complex assembly where spatial freedom matters more than speed.
How many axes does a robotic arm have?
Robotic arms commonly range from 2 to 7 axes. Four-axis and 6-axis configurations are the most widely used in industrial manufacturing. Each additional axis adds a degree of freedom and expands range of motion, though it also increases cost, programming complexity, and coordination overhead.
What industries use 4-axis robot arms?
Four-axis robots are widely used in plastic injection molding, electronics assembly, food and beverage packaging, pharmaceuticals, automotive manufacturing, and warehouse palletizing operations. These industries share a common requirement: high-volume, repetitive tasks with defined motion paths.
What are the limitations of a 4-axis robot arm?
Handling parts that arrive in irregular orientations or require approach from multiple angles is beyond what 4-axis robots can reliably manage — those tasks typically call for 5 or 6 axes. They also operate from a fixed base within a defined work envelope, which makes them best suited to structured, repeatable applications rather than variable-path work.