
What Is Pick and Place in Injection Molding?
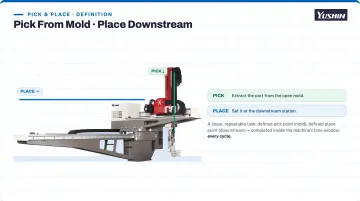
In injection molding, pick and place describes the complete part-handling sequence: the robot picks the molded part from the open mold and places it at the designated downstream position. This is a linear, repeatable task—defined pick point (the mold), defined place point (the downstream station), and a robot cycle that must complete within the molding machine's available time window.
The full sequence:
- Mold opens; part is ejected or held in cavity
- Traverse axis positions robot over the mold
- Vertical axis descends; EOAT engages the part
- Robot retracts; part exits the mold space
- Traverse axis moves part to placement position
- EOAT releases part to conveyor, fixture, or station
- Robot returns to home; mold closes; next cycle begins
Each axis of this sequence is linear—traverse (X), kick/horizontal (Y), vertical stroke (Z). This is why Cartesian robots dominate injection molding pick-and-place: the task is linear, the path is structured, and Cartesian linear motion handles it efficiently.
Why Cartesian Robots for Injection Molding Pick and Place
Cartesian architecture matches the geometry of injection molding cells:
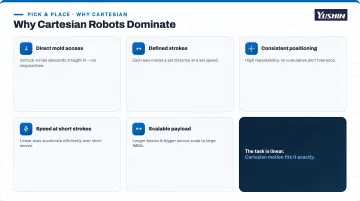
- Direct mold access: The vertical stroke descends straight into the open mold space—no kinematic complexity, no singularities, no joint-angle path planning.
- Defined strokes: Each axis moves a defined distance at a defined speed. Stroke lengths, speeds, and timing are sized to the IMM, mold, and cycle time.
- Consistent positioning: Cartesian linear guides deliver high repeatability without cumulative joint tolerances. The pick point is the same on every cycle.
- Speed at short strokes: Linear axes accelerate efficiently over the short distances typical of injection molding extraction cycles. This matters when cycle times are measured in seconds.
- Scalable payload: Longer beams and higher-rated servos scale the architecture to larger IMMs and heavier payloads without changing the fundamental robot geometry.
EOAT: The Pick Interface
The quality of the pick depends entirely on the EOAT—the end-of-arm tooling that contacts and holds the part during extraction and placement. EOAT design must account for:
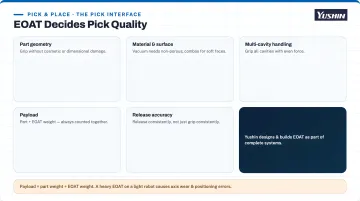
- Part geometry: Where on the part can the robot grip without causing cosmetic or dimensional damage?
- Material and surface: Hard grippers may mark soft surfaces; vacuum cups require non-porous contact surfaces; combination tooling may be needed.
- Multi-cavity handling: In multi-cavity molds, the EOAT must grip all parts simultaneously, with consistent force across all cavities.
- Payload: EOAT weight is part of the total payload. A heavy EOAT on a light-payload robot causes axis wear and positioning errors over time. Always calculate payload as part weight plus EOAT weight.
- Release accuracy: The placement point must receive the part in a defined orientation. EOAT must release consistently, not just grip consistently.
Yushin America designs and builds EOAT as part of complete automation systems. For applications where EOAT design is complex—insert loading, overmolding, fragile parts, multi-cavity thin-wall—Yushin's engineering team works through grip point, orientation, and release requirements.
The Place: Downstream Positioning Options
The place step determines what the robot does with the part after it exits the mold. Common downstream placements in injection molding cells:
| Placement target | Application context |
|---|---|
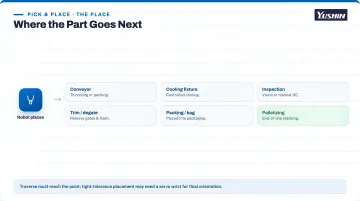
| Belt or roller conveyor | Standard parts to cooling station or packing |
| Cooling fixture | Parts that require controlled cooling before packing |
| Inspection station | Vision or manual quality check before packing |
| Trim or degating station | Parts with gates, runners, or flash to remove |
| Packing / bag station | Parts placed directly into packaging by the robot |
| Palletizing system | End-of-line case stacking after packing |
The robot's traverse stroke must reach the placement point. The placement accuracy must match the downstream station's requirements. For tightly toleranced placement—fixture loading, insert placement, precision stacking—servo wrist axes may be needed to control the part's final orientation.
Advanced Pick-and-Place Applications: Insert Loading and Overmolding
Some injection molding pick-and-place applications require more than a simple linear pick-and-place cycle:
- Insert loading: The robot picks an insert from a tray or feeder, orients it precisely, and places it into the mold cavity before closing. The pick is from a defined insert location; the place is into the mold cavity at a defined orientation.
- Overmolding: The robot picks a finished part from one mold operation, reorients it, and places it into a second mold for the overmold shot.
- Angled or rotated placement: Parts must be placed at a defined angle or in a defined orientation that the linear axes alone cannot achieve.
These applications require Yushin's NC servo wrist units—A/C, B/C, or A/B/C wrist axis configurations that add controlled orientation capability to the take-out robot. They are available in 2-axis and 3-axis configurations, support teach-and-save programming through the robot controller, and keep the system practical for production-floor operators.
Insert loading and overmolding are important Yushin America application capabilities. They require deeper engineering review—EOAT design, servo wrist configuration, insert-handling tooling, and operator workflow—but they are not reasons to move away from Cartesian pick-and-place architecture.
Yushin Cartesian Pick-and-Place Robot Product Fit
| Application | Yushin solution |
|---|---|
| Standard pick-and-place, 30–1,300 tf | YD/YD2 Series standard take-out robots |
| High-speed pick-and-place, energy efficiency | RC-SE high-end high-speed take-out robot |
| Safety-certified pick-and-place, advanced cells | FRA Series high-end take-out robots |
| Large parts, 1,500+ tf | MKA-2000S large full-servo traverse robot |
| Small IMMs, 30–100 tf | YD-0310 compact take-out robot (3 kg payload) |
| Complex orientation, insert loading, overmolding | NC servo wrist units on YD/YD2 or FRA Series |
| End-of-line case palletizing | PA Series compact palletizing robot |
| Sprue/runner pick | HOP Five, N-HOP, miniHOP, V-HOP sprue pickers |
Confirm IMM clamp force, payload including EOAT, cycle time, and downstream placement requirements with Yushin America for application-specific sizing.
Pick-and-Place Selection Criteria
When selecting a Cartesian pick-and-place robot for an injection molding cell:
- IMM clamp force and platen size - determines traverse beam span and required stroke lengths
- Part weight plus EOAT weight - total payload; always include EOAT in payload calculations
- Cycle time - take-out time must fit within the available extraction window; faster cycles require optimized axis design
- Number of cavities - multi-cavity tooling requires EOAT that handles all cavities simultaneously; higher cavitation often drives payload up
- Part geometry and fragility - drives EOAT design; grip points, vacuum cup placement, release timing
- Downstream placement accuracy - define placement requirements before selecting robot and EOAT
- Orientation requirements - if placement requires part rotation beyond flip, a servo wrist axis is needed
- Controller usability - Yushin's E-touch controller is designed for molding-plant operators and maintenance personnel
- Parts and service support - confirm local service coverage and spare parts inventory
When Cartesian Pick-and-Place May Not Be the Right Fit
- Very low production volume: At low annual cycle counts, automation payback may not be reached. A volume and cycle-time analysis is recommended before committing.
- Highly variable part geometries with very frequent mold changes: Complex changeover sequences may require modular EOAT or servo wrist investment that changes the ROI calculation.
- Completely unstable mold process: If the part ejection is inconsistent, the robot will surface that immediately. Stabilize the mold and process before automating extraction.
- One-time or prototype runs: For truly one-off production, manual handling may be more cost-effective than robot integration.
Implementation and Support
Yushin America provides installation, EOAT engineering, operator training, field service, and parts support for all Yushin take-out robot systems across North America.
- 24/7 phone support: 888-707-6268
- Over $1.3M in spare parts inventory with overnight shipping
- Yushin University: Yushin robot training and programming
- Yushin America field service and support
Frequently Asked Questions
What does "pick and place" mean in injection molding? In injection molding, pick and place is the act of extracting a molded part from the open mold (the pick) and placing it at a downstream location—conveyor, fixture, inspection station, or packaging (the place). It is performed on every production cycle by the take-out robot.
Why are Cartesian robots used for injection molding pick and place? Cartesian robots match the geometry of injection molding cells: the pick is at a defined location in the mold space (accessed via vertical stroke), and the place is at a defined downstream location (reached by traverse). Linear axes are efficient at short, repeatable strokes, and Cartesian architecture delivers high positional repeatability without joint-angle complexity.
What payload do I need for injection molding pick and place? Payload must include both the molded part weight and the EOAT weight. In multi-cavity molds, payload includes all parts handled simultaneously plus EOAT. Underestimating payload causes axis wear and positioning errors. Confirm payload with your EOAT design before selecting a robot.
Can Cartesian pick-and-place robots handle insert loading? Yes. Insert loading requires the robot to pick an insert, orient it precisely, and place it into the mold cavity. This uses Cartesian linear axes for positioning and NC servo wrist units for orientation control. Yushin supports insert loading as an advanced application requiring engineered EOAT and servo wrist configuration.
How fast does a pick-and-place robot need to be for injection molding? The robot's pick-and-place cycle must complete within the available extraction window—which varies from under 1 second in high-speed thin-wall molding to several seconds in standard production. Confirm take-out time capability against your specific molding cycle when selecting a robot.
What is the difference between a take-out robot and a palletizing robot? A take-out robot handles part extraction from the IMM (the pick from the mold) and initial placement to downstream handling. A palletizing robot—like Yushin's PA Series—handles end-of-line case or tray stacking onto pallets after parts have been packed and boxed. Both are pick-and-place robots, but they operate at different points in the cell with different payloads and placement requirements.
Conclusion
Cartesian pick-and-place in injection molding is not a generic robotics concept—it is the specific task of extracting molded parts from the mold and placing them at downstream locations, repeated on every production cycle. The right robot, EOAT, and downstream placement system determine how well the cell performs: cycle time, part quality, scrap rate, and labor dependency are all affected by how consistently the pick-and-place cycle is executed.
Yushin America designs and supports Cartesian pick-and-place robots, EOAT, and downstream automation for injection molding cells across North America. If your cell is dealing with inconsistent part extraction, placement errors, part damage, or cycle-time pressure, contact Yushin America to discuss the right take-out robot and EOAT configuration for your application.


