
Introduction
Choosing the right robot for an industrial application isn't just a procurement decision — it's an engineering one. Plant managers and automation engineers face a consistent challenge: understanding how each robot type moves, what loads it can handle, and where its design actually fits the work being done.
Cartesian coordinate robots are among the most widely deployed systems in industrial automation, yet the fundamentals rarely get the attention they deserve in purchasing conversations. The concept is straightforward, and the performance implications are real.
This post covers what Cartesian robots are, how they work, their defining characteristics, and the industries where they deliver the most value. For plastics processors and injection molders specifically, understanding these fundamentals directly affects decisions around cycle time, part quality, and automation ROI.
Key Takeaways
- Cartesian robots move linearly along three perpendicular axes (X, Y, Z), producing precise, predictable motion within a rectangular workspace
- Key strengths: high repeatability, straightforward coordinate programming, scalable stroke lengths, and strong payload capacity
- Cantilevered designs provide single-side access; gantry configurations span larger workspaces and handle heavier loads
- Core applications include pick-and-place, injection molding part extraction, assembly, packaging, and electronics manufacturing
- Cartesian systems offer simpler kinematics than articulated or SCARA robots, making them the practical choice for structured, repetitive tasks
What Is a Cartesian Coordinate Robot?
A Cartesian coordinate robot is an industrial robot whose three primary motion axes are linear and perpendicular to each other — the X (horizontal), Y (lateral), and Z (vertical) axes of a standard coordinate system. You'll also see these called linear robots or, in overhead configurations, gantry robots.
The key distinction from other robot types is motion geometry:
- Cartesian robots move exclusively in straight lines along each axis — no rotation in the primary structure
- Articulated robots use rotating joints to reach positions
- SCARA robots combine rotation with limited linear motion
Avoiding rotation entirely simplifies both the mechanical design and the math required to position the end effector accurately.
The same mechanical principle appears in familiar non-industrial equipment — 3D printers, CNC milling machines, and pen plotters all use Cartesian motion.
Key Characteristics of Cartesian Coordinate Robots
High Positional Precision and Repeatability
Because each axis moves independently in a constrained straight path, positioning errors don't accumulate across joints the way they can in rotary systems. This makes Cartesian robots highly repeatable across thousands of production cycles.
Manufacturer specifications illustrate the range of precision available:
- Yamaha XY-X series: ±0.01 mm repeatability
- Gudel CP 3-axis gantry: ±0.02 mm repeatability
- IAI CRS Cartesian robot: ±0.03 to ±0.06 mm repeatability
- Festo EXCT linear gantry: ±0.1 mm repeatability

The right specification depends on application requirements. Across all four examples, the architecture consistently supports the tight tolerances that quality-sensitive manufacturing requires.
Rectangular Workspace and Scalable Stroke
The work envelope of a Cartesian robot is a defined box shape — determined by the travel length of each axis. Contrast this with the arc-shaped envelopes of articulated arms. The rectangular envelope maps naturally to conveyor layouts, pallet grids, and production cell footprints.
Stroke length scales directly with linear stage length. Parker's standard gantry catalog documents X-axis strokes up to 8.5 meters with payloads reaching 150 kg. Güdel's CP gantry extends even further — X-axis travel up to 100,000 mm at speeds up to 150 m/min. Bosch Rexroth's linear robot line covers loads up to 200 kg on two-axis configurations.
Robotic arms are constrained by reach radius; Cartesian systems simply extend the linear stage to match the application. That structural simplicity carries into programming as well.
Structural Simplicity and Ease of Programming
Programming a Cartesian robot is conceptually direct: moving X millimeters along an axis moves the tool X millimeters in space. There's no inverse kinematics calculation required. Operators can program trajectories by entering target X/Y/Z coordinates directly — a meaningful difference compared to the joint-angle programming required for articulated arms.
Setup time decreases, changeover is faster, and production staff without deep robotics training can manage routine programming tasks.
Reliability in Industrial Environments
Linear drive mechanisms — ball screws, belt drives, and rack-and-pinion systems — are robust, well-understood components that handle dusty, wet, or thermally variable environments. Each drive type suits different application demands:
| Drive Type | Best For | Limitation |
|---|---|---|
| Ball screw | High precision, vertical loads | Speed and stroke limits from screw whip |
| Belt drive | Long strokes, high speed | Lower precision than ball screw |
| Rack-and-pinion | Very long travel, heavy loads | Higher mechanical complexity |
How Cartesian Coordinate Robots Work: Core Components
Linear Axes and Motion Structure
Each axis consists of a linear actuator (the motion source) mounted parallel to linear bearings that carry the load and maintain alignment. The three axes stack together to create the robot's full range of motion.
Motor and feedback options vary by application:
- Servo motors — used in most industrial Cartesian robots for precise, high-speed positioning with encoder feedback
- Stepper motors — used in lower-speed or lower-cost configurations; provide high torque at low speed but require homing after power loss
- Absolute encoders — retain exact position after power loss without rehoming, per HEIDENHAIN's documented specifications
- Incremental encoders — measure relative movement; generally require a reference run after startup
Linear encoders integrated directly into the actuator provide better repeatability than motor-mounted rotary encoders alone.
Serial vs. Gantry Construction
Two primary structural configurations define how Cartesian robots are built:
| Configuration | Structure | Best For |
|---|---|---|
| Cantilevered (serial) | Each axis stacked on the previous, supported at one end | Pick-and-place, lab automation, standard part extraction |
| Gantry | Horizontal beam supported at both ends (bridge-style) | Heavy-duty overhead operations, large-workspace applications |
The gantry's dual-end support delivers significantly greater rigidity and load capacity — the key reason it dominates large-format and heavy-payload applications.
Degrees of Freedom and Control
A standard Cartesian robot has three translational degrees of freedom — one for each linear axis. Some configurations add rotational degrees of freedom at the end effector (a servo wrist) for tasks requiring tool orientation, but the core structure remains purely translational.
The controller — typically a PLC or dedicated motion controller — receives programmed coordinates and translates them into synchronized axis commands. Because each coordinate maps directly to a physical position, programming is straightforward.
Operators can enter target positions numerically rather than manually tracing paths with a teach pendant, as articulated arm programming requires. This reduces setup time and lowers the skill threshold for motion programming.
Cartesian Robot Applications Across Industries
Pick-and-Place and Material Handling
Cartesian robots dominate automated pick-and-place operations — moving parts from one defined position to another with high speed and accuracy. The rectangular workspace aligns naturally with conveyor layouts and pallet grid patterns, making these robots a logical fit for loading/unloading production lines, bin transfer, and sortation tasks.
Plastic Injection Molding — Part Extraction
One of the most specialized and widespread applications of Cartesian robots is the extraction of molded parts from injection molding machines. A Cartesian take-out robot enters the mold space on a linear axis, grips the part, and retracts it — requiring the precise, repeatable, fast motion that Cartesian systems are built for.
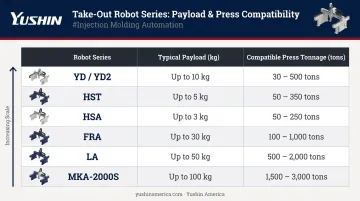
Yushin America, which has specialized in injection molding automation since selling its first robot in 1978, builds its entire take-out robot portfolio around 3-axis Cartesian architecture. The lineup spans a wide range:
| Series | Typical Payload | Compatible Press Tonnage |
|---|---|---|
| YD / YD2 Series | 5–15 kg | 50–850 ton |
| HST Series | 3–10 kg | ~100–650 ton |
| HSA Series | 3–8 kg | ~100–650 ton |
| FRA Series | 10–30 kg | ~400–1,500 ton |
| LA Series | 20–50 kg | ~600–1,500 ton |
| MKA-2000S | 30–80+ kg | ~800–3,000 ton |
Axis conventions across Yushin's top-entry traverse robots follow a consistent pattern:
- X-axis: Traverses the robot arm into position over the open mold
- Y-axis (kick): Drives the end-of-arm tooling down into the mold cavity
- Z-axis: Manages vertical lift or in/out retraction to clear the mold before the X-axis returns to the part-release position
Robot-control software integrated with the molding machine cycle can reduce cycle time by 10–15%, with press-integrated robot position control contributing an additional 5–10% savings — figures with direct impact on cost per part.
Assembly, Welding, and Dispensing
Cartesian robots handle repetitive operations including adhesive dispensing, solder application, spot welding, and component insertion. The tool follows a defined path across a flat or three-dimensional surface with consistent force and speed — the conditions where Cartesian kinematics deliver their most reliable results.
Assembly Magazine documents Cartesian robots used across PCB screwdriving, adhesive dispensing, conformal coating, and soldering applications, with systems from multiple manufacturers deployed in production environments.
Packaging, Palletizing, and Electronics
Gantry Cartesian robots handle case packing, product stacking, and palletizing within large overhead workspaces. The scalable stroke length of gantry systems covers full pallet footprints that fixed-reach arms cannot match.
In electronics, Cartesian robots manage PCB assembly, semiconductor handling, and precision dispensing tasks. According to Fact.MR's Cartesian robot market analysis, electronics accounts for approximately 30.8% of end-use demand in the Cartesian robot market — reflecting how critical positional accuracy is in working with small, high-value components.
Laboratory automation represents another high-precision application. Tecan's Cavro platform uses XYZ Cartesian coordinate robots for OEM liquid-handling systems, where the robot must aspirate and dispense precise liquid volumes at defined positions across a coordinate grid.
Cartesian Robots vs. Other Industrial Robot Types
Cartesian vs. Articulated Robots
Articulated robots (6-axis arms) offer greater flexibility : they can reach around obstacles and orient tools in any direction. That flexibility comes with trade-offs: rotary joint kinematics make programming more complex, and positional accuracy depends on the cumulative precision of every joint in the chain.
Cartesian robots trade orientation flexibility for predictability — a worthwhile exchange when tasks are structured, repetitive, and confined to a defined rectangular workspace. Rollon's comparison of linear and six-axis systems finds that linear motion systems consistently outperform articulated robots in applications involving long strokes, heavy loads, high dynamics, and tight installation spaces.
Cartesian vs. SCARA Robots
SCARA robots move faster than Cartesian systems for horizontal pick-and-place within a circular reach envelope. But that circular envelope creates real constraints. When an application requires large rectangular work areas, long horizontal strokes, or significant vertical travel, the Cartesian system's cube-shaped workspace is the more practical geometry.
Repeatability across the full travel range is where Cartesian systems pull ahead. A3/Automate's SCARA vs. Cartesian comparison confirms that Cartesian systems hold tighter tolerances over large work areas — a meaningful edge when consistency across the entire workspace is non-negotiable.
Choosing the Right Configuration
Use this framework when evaluating robot type:
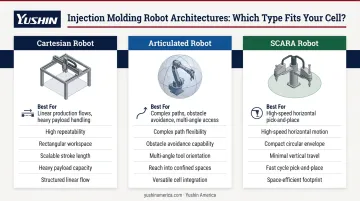
- Cartesian: high repeatability in a rectangular workspace, large or scalable work area, significant payload capacity, or direct integration with linear production flows
- Articulated: complex path flexibility, obstacle avoidance, or multi-angle tool orientation required
- SCARA: high-speed horizontal pick-and-place within a compact circular reach envelope where vertical travel is minimal
Frequently Asked Questions
What is the Cartesian configuration of a robot?
The Cartesian configuration refers to a robot whose axes of motion are three perpendicular linear axes aligned with X, Y, and Z coordinates. Each axis produces straight-line motion rather than rotary motion, making positioning geometry direct and predictable.
How many degrees of freedom does a Cartesian coordinate robot have?
A standard Cartesian robot has three translational degrees of freedom — one per linear axis. Some configurations add one or more rotational degrees of freedom at the end effector for tool orientation, but the core linear structure itself remains at three.
What is the difference between a Cartesian robot and a gantry robot?
A gantry robot is a type of Cartesian robot where the horizontal beam is supported at both ends, providing greater rigidity and load capacity for overhead applications. A cantilevered Cartesian robot is supported at only one end, offering easier workspace access for tasks like standard part extraction.
What are the main advantages of Cartesian robots over articulated robots?
Cartesian robots offer simpler kinematics — coordinates map directly to physical positions — along with higher structural rigidity, scalable work envelopes, and strong suitability for structured, repetitive tasks. Articulated robots are the better choice where complex tool orientation or obstacle avoidance is required.
What industries use Cartesian coordinate robots most frequently?
The most common industries include plastic injection molding (part extraction), electronics manufacturing (PCB assembly, semiconductor handling), packaging and palletizing, automotive assembly, and laboratory automation — all benefiting from high repeatability within structured workspaces.
How are Cartesian robots used in injection molding?
In injection molding, Cartesian take-out robots use linear axis motion to enter the open mold, grip the finished part, and retract it in sync with the machine cycle. This minimizes cycle time, prevents part damage, and supports consistent downstream handling or quality inspection.


