
Introduction
Plant operators and engineers running high-volume production lines face constant pressure to reduce cycle times, cut labor costs, and maintain tight tolerances across thousands of parts per shift. For many, linear robots are the answer — the default choice for structured, repetitive manufacturing tasks.
Linear robots move along straight-line axes rather than rotating joints. That geometry means fewer mechanical variables, higher repeatability, and lower total cost of ownership for tasks that don't require complex part orientation.
This guide covers what linear robots are, how they work, where they excel, and how to evaluate them for your operation. Injection molding environments get dedicated attention — it's the application where linear robots have proven most dominant.
Key Takeaways
- Linear robots move along X, Y, and Z axes in straight lines, producing a rectangular work envelope ideal for structured production tasks
- They deliver some of the highest repeatability of any industrial robot type due to the absence of rotating joints
- Common applications: pick and place, palletizing, packaging, sorting, and injection molding part extraction
- Cost advantage over articulated and SCARA robots makes them the go-to choice for high-repetition, single-plane tasks
- Right-sizing a linear robot requires matching payload, stroke length, precision, and environmental conditions to the application
What Is a Linear Robot?
A linear robot is an industrial robot whose principal axes of motion travel in straight lines rather than rotating. Per ISO 8373:2021, a Cartesian robot is defined as a manipulator with three prismatic joints whose axes form a Cartesian coordinate system — X, Y, and Z — all oriented at right angles to one another.
Naming Conventions
These robots go by several names, and the distinctions matter:
- Cartesian robots — the standard term; refers to any robot using X/Y/Z linear axes
- Rectilinear robots — another synonym, emphasizing the straight-line motion profile
- Gantry robots — a specific Cartesian configuration where the horizontal member is supported at both ends (like a bridge), providing greater structural rigidity for larger payloads and longer spans
- Linear robots — the broadest term, often used interchangeably with Cartesian
All gantry robots are linear robots, but not all linear robots are gantry robots. The gantry configuration uses two base axes rather than one, which Linear Motion Tips notes as the key structural distinction.
How these robots mount in a cell follows from their structure. The robotic manipulator typically sits on a grid rail system overhead, above the work area. Some compact configurations mount on tabletops; others are positioned below workpieces in specialized cells. The overhead mount is most common in manufacturing because it keeps the work area clear and accessible from multiple sides — a feature NIST identifies as one of the core advantages of Cartesian robots.
Payload Range
Payload capacity varies considerably by system design. Across major manufacturers, documented ranges include:
| System Type | Payload Range |
|---|---|
| Compact Cartesian modules (e.g., Parker XRS) | 5–25 kg |
| Gantry-type (e.g., Yamaha XY-X) | 19–50 kg |
| Mid-range Cartesian (e.g., IAI) | Up to 78 kg |
| Heavy-duty linear robots (e.g., Bosch Rexroth) | Up to 160–200 kg |
| Large gantry systems (e.g., Gudel) | Several tonnes |
For injection molding take-out specifically, Yushin America's Cartesian traverse robot portfolio spans 1 kg to 80+ kg, scaling from compact sprue pickers on 30-ton presses all the way to the MKA-2000S heavy-duty robot for 1,500–3,000-ton machines producing automotive bumpers and structural panels.
How Linear Robots Work: Axes, Motion, and Work Envelope
The Three-Axis Configuration
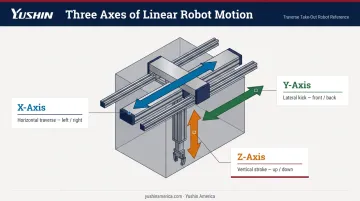
Every linear robot's motion breaks down into three independent axes:
- X-axis — horizontal travel along the rail (traverse)
- Y-axis — lateral or kick movement (cross-mold direction)
- Z-axis — vertical motion (up/down for extraction or placement)
Each axis operates independently and in concert, positioning the end effector at precise coordinates within the work zone. The robot has no rotating joints. Three linear slides move through programmed positions — nothing more.
Work Envelope
Because all motion is linear, the resulting work envelope is cubic or rectangular. In a production cell, that means the robot's reach is well-defined, easy to guard, and leaves no ambiguous zones for operators or tooling to navigate around.
A3/Automate notes that this rectangular work envelope contrasts directly with the spherical or cylindrical envelopes of articulated and SCARA robots — which introduce more positional complexity for tasks that don't require it.
Rail length determines envelope size:
- Short rails suit compact cells with limited floor space
- Long rails allow a single robot to service multiple machines or cover large workpieces without repositioning — improving throughput and consistency
For palletizing applications, Cartesian gantry systems can reach work envelopes as large as 6,000 × 6,000 × 1,500 mm (Assembly Magazine, Igus Drylin XXL example).
Drive Mechanisms
Three primary drive systems translate motor output into linear motion. Each has a distinct performance profile:
| Drive Type | Best For | Key Limitation |
|---|---|---|
| Ball screw | High precision, fine positioning, high thrust | Travel length (speed drops on longer screws) |
| Belt drive | Long travel, high speed (up to 10 m/s) | Lower stiffness vs. ball screw |
| Rack-and-pinion | Extended stroke, heavy-duty gantry | Backlash management required |
According to Linear Motion Tips, ball screws are the first choice for high positioning accuracy and thrust loads, while rack-and-pinion systems have virtually no limit on travel length — making them practical for large gantry configurations.
Servo Feedback and Motion Control
The drive mechanism gets the axis moving — servo feedback is what keeps it accurate. Servo motors paired with linear actuators form a closed-loop system that continuously corrects position errors in real time.
Parker's engineering documentation notes that motion controllers read actual position feedback, calculate error, and send corrective commands to the servo amplifier continuously. High-resolution linear encoders can provide positional resolution down to 0.1 microns on precision stages, with production take-out robots operating at tolerance bands matched to their specific application.
Key Benefits of Linear Robots
Accuracy and Repeatability
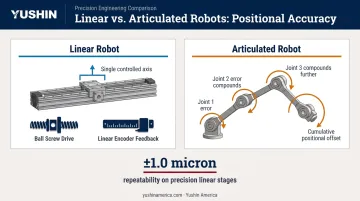
Linear robots define each position by travel along a fixed rail, not by resolving multiple joint angles. That mechanical simplicity eliminates the cumulative angular error that multi-joint articulated systems accumulate over time.
A3/Automate describes Cartesian robots as capable of providing repeatable, accurate actions at reasonable cost, with ball-screw actuators delivering better repeatability than belt alternatives for precision applications. Parker's precision stage datasheets document repeatability of ±1.0 micron on high-end linear servo tables, with production-grade take-out robots calibrated to tolerances suited for molding environments.
Speed and Productivity
Fixed rails allow linear robots to run repetitive cycles at consistent speeds without the fatigue or variation that comes with manual labor. This enables lights-out production — unmanned overnight runs that eliminate third-shift labor costs.
Plastics Technology documents a lights-out two-machine molding cell using conveyor buffering as a concrete example of what this looks like in practice.
Reprogrammability
Unlike hard-tooled automation, linear robots can be reprogrammed to handle new part geometries or accommodate product changes. Yushin's E-touch controller platform makes this practical through several programming modes:
- Lead-Through-Teach (LTT): Operators guide the robot through positions manually to record a program
- Flexible-Teach (FLX): Offline software lets teams build and test programs without stopping the production cell
- Mode Select: Stores complete recipes that operators can call up at changeover — no reprogramming required
Total Cost of Ownership
For highly repetitive, single-plane tasks, linear robots typically carry lower acquisition and maintenance costs than articulated robots. Assembly Magazine describes them as "simple and cost-effective" for these use cases, and the absence of complex joint assemblies lowers long-term maintenance costs.
Top Applications of Linear Robots in Manufacturing
Pick and Place, Sorting, and Packaging
Linear robots excel in high-speed pick and place because the rectangular work envelope maps directly to structured conveyor and assembly line layouts. When paired with vision systems, they handle sorting tasks with greater consistency than manual processes.
For 24/7 packaging operations, linear robots eliminate overnight labor while maintaining cycle consistency — critical for operations where a single misplaced part can disrupt downstream automation.
Palletizing
Automating pallet stacking removes the safety risk of repetitive heavy lifting. Per OSHA's materials handling guidelines, manual material handling hazards include strains, sprains, fractures, and back injuries — risks that palletizing automation directly addresses.
Yushin's PA Series compact palletizers (PA-20 and PA-40) are purpose-built for end-of-line integration with injection molding cells. The PA-40 achieves 420 boxes per hour, with a 40 kg payload capacity and recipe-driven pattern programming that accommodates SKU changeovers without reprogramming. An automap feature calculates optimal stacking patterns automatically, further reducing operator intervention.

Injection Molding Part Extraction
One of the most impactful applications for linear robots is automated take-out from injection molding machines. Speed, precision, and cycle-time consistency directly affect part quality and machine uptime — making the match between linear robot characteristics and injection molding requirements a strong one.
Plastics Technology states that Cartesian/linear robots are molders' first choice in a large majority of injection molding applications.
Yushin America has specialized in exactly this application for over 50 years, engineering take-out robots specifically designed for injection molding environments. Their portfolio covers the full range of molding demands:
- TSXA and HSA — sub-3-second IML cycles for high-speed packaging applications
- MKA-2000S — heavy-duty extraction for automotive bumpers and structural panels on 2,000–3,000-ton presses
Linear Robots vs. Other Robot Types
Understanding when a linear robot is the right choice requires a direct comparison against the alternatives:
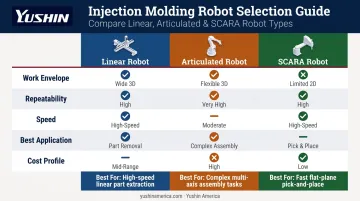
Linear vs. Articulated Robots
- Articulated robots offer greater range of motion and can navigate complex geometries — better for welding, painting, and tasks requiring multi-angle access
- Linear robots win on repeatability and cost for structured, repetitive tasks where complex orientation isn't required
- Rotating joints in articulated robots introduce more positional variables; linear robots eliminate that source of error
Linear vs. SCARA Robots
- SCARA robots are fast and well-suited to small-footprint assembly and insertion tasks
- Their cylindrical work envelope limits reach; linear robots provide greater coverage, especially in gantry configurations
- For tasks requiring a large structured work area, linear robots are the practical choice
When to Choose a Linear Robot
A linear robot is typically the most economical and reliable choice when:
- The task is highly repetitive with consistent cycle parameters
- Parts move within a defined rectangular space
- High repeatability is required but complex part orientation is not
- Long-term cost matters more than upfront price
If a task requires multi-angle access, obstacle avoidance, or continuous-path motion in three-dimensional space, an articulated robot is the better fit.
Choosing the Right Linear Robot for Your Operation
Key Selection Variables
Start with these parameters before evaluating any specific model:
- Payload capacity — include the end-of-arm tooling weight, not just the part weight
- Stroke length (travel distance) — determines the size of the work envelope on each axis
- Positional accuracy and repeatability tolerances — driven by part geometry and quality requirements
- Environmental factors — cleanroom, humidity, or particulate exposure will narrow the field. For example, Yushin's SX-41 side-entry robot carries ISO Class 6 cleanroom certification (ISO 14644-1) for medical and pharmaceutical applications; the HSA and RC-SE carry IP44 ratings for industrial environments
- Integration requirements — compatibility with existing IMM interfaces and downstream automation
Linear Motion Tips recommends starting with four core parameters: load, orientation, speed, and travel distance — a practical shortlist for initial screening.
For Injection Molding Environments
Injection molding adds application-specific complexity: molding cycle times, mold interface geometry, EUROMAP 67/12 electrical interface compatibility, and the need for consistent take-out timing that doesn't introduce variation into the molding process.
Yushin America's five decades in injection molding take-out have produced a portfolio built around these demands. That includes standard traverse robots (YD/YD2), high-speed systems (HST, HSA), side-entry IML robots (TSXA, SXC family), and heavy-duty large-part take-out (MKA-2000S) — each developed specifically for molding environments.

Their Yushin University training platform also ensures plant-level operators can reprogram robots, manage mode selects, and execute changeovers independently — keeping flexibility in-house across changing product runs.
Frequently Asked Questions
What is a linear robot?
A linear robot is an industrial robot that moves along straight-line axes (X, Y, Z) rather than rotating joints. It operates within a rectangular work envelope and is commonly referred to as a Cartesian, gantry, or rectilinear robot depending on its configuration.
Why are linear actuators so expensive?
Precision-machined components — ball screws, high-grade guide rails, servo motors, and linear encoders — along with strict quality tolerances and robust construction for industrial duty cycles all drive cost. That said, total cost of ownership is often lower than articulated robots for high-repeatability, single-plane tasks.
What is the difference between a linear robot and a gantry robot?
A gantry robot is a specific type of linear robot where the horizontal member is supported at both ends (like a bridge), providing greater structural rigidity for larger payloads and longer spans. All gantry robots are linear robots, but not all linear robots are gantry robots.
What industries use linear robots?
Linear robots are used across plastics manufacturing (injection molding part extraction), packaging and logistics, automotive assembly, food and beverage, electronics, medical devices, and pharmaceutical production.
What is the work envelope of a linear robot?
The work envelope is cubic or rectangular, determined by the length and configuration of the rail system along each axis. This contrasts with the spherical envelopes of articulated robots and the cylindrical envelopes of SCARA robots.
Are linear robots easy to reprogram for different tasks?
Yes. Linear robots can be reprogrammed relatively quickly to accommodate product changes or new part geometries. Most modern controllers support stored recipe programs and offline programming tools — for example, Yushin's E-touch controller handles this directly from the touchscreen — so changeovers can happen without halting production.


