
Introduction
Manufacturing plants face a familiar problem: repetitive handling tasks that demand speed and precision — but drain labor, introduce errors, and create throughput bottlenecks. According to Deloitte and The Manufacturing Institute, the U.S. manufacturing skills gap could leave 2.1 million jobs unfilled by 2030, and 77% of manufacturers already report ongoing difficulty attracting and retaining workers.
Pick and place robots are built for exactly this gap. These automated systems pick up objects from one location and deposit them precisely in another — guided by programmed motion paths, sensors, and end-of-arm tooling to handle repetitive transfers with speed and consistency that manual labor can't sustain at scale.
Understanding how these systems work — and which type fits your operation — is the first step toward closing that gap. This article covers how pick and place robots work, the five main types, common industrial applications, and what to consider when evaluating them for your facility.
Key Takeaways
- Pick and place robots automate repetitive object-handling tasks, boosting speed and throughput with consistent accuracy
- Five primary robot types — articulated, delta, cartesian, SCARA, and cobot — each suit different applications based on speed, payload, and precision
- Common applications span assembly, packaging, bin picking, sorting, inspection, and injection molding part removal
- Selection hinges on axis count, payload, reach, repeatability, speed, and vision capability
- Most systems deliver ROI through labor savings, lower error rates, and near-continuous operation
How Pick and Place Robots Work
Every pick and place robot follows the same basic operating sequence:
- Receive instructions — the robot executes programmed movements defining start and end positions
- Locate the target — cameras and sensors identify the object's position, shape, and orientation
- Activate end-of-arm tooling — a gripper, vacuum cup, or magnetic tool grasps the object
- Transfer and place — the robot moves the object to its designated location and releases it
- Return and repeat — the cycle restarts, hundreds of times per hour

Movement Types and Axis Count
Axis count determines what movements a robot can perform:
- Linear movements — straight-line transfers along X, Y, Z axes (3-axis robots)
- Rotational movements — reorienting objects before placement (5-axis robots add two rotational joints)
- Complex multi-axis movements — combining rotation and translation for flexible, precise manipulation (6-axis robots)
Higher axis counts unlock greater flexibility for complex reorientation tasks, while lower axis counts deliver tighter, more consistent precision on fixed-path transfers — the right choice depends on whether your application demands flexibility or repeatability.
The Role of Vision Systems
Vision-guided robotics use integrated machine vision to identify an object's location and guide the robot to the correct pick point. This matters most when items arrive in random order or varying orientations. A vision system typically handles:
- Identifying objects within irregular, unsorted collections
- Calculating optimal picking sequence
- Using color and depth data to build a 3D positional reference
- Confirming pick accuracy before transfer begins
Types of Pick and Place Robots
Robot type determines speed, workspace coverage, payload capacity, and accuracy. Each design involves trade-offs worth understanding before committing to a solution.
Articulated Robotic Arms (5-Axis and 6-Axis)
Articulated robots are the most common pick and place type, with rotary joints that work similarly to a human arm. According to Plastics Technology, five-axis robots add two rotational movements to standard X/Y/Z motion, while six-axis robots provide a full six degrees of freedom.
Best-fit applications:
- 5-axis — straightforward conveyor-to-box transfers where objects move in a single plane
- 6-axis — electronics assembly, complex part orientation, detailed product inspection
One caveat: more axes can introduce more potential error. Precision-critical applications sometimes favor fewer, tighter axes over maximum flexibility.
Delta Robots
Delta robots use a distinctive parallel-link (triangular) arm structure connected to a central joint above the workspace. This configuration enables extremely fast, lightweight movements, making them the fastest pick and place type measured by picks per minute.
Real-world benchmarks:
- ABB IRB 365 FlexPicker: 120 picks/minute for 1 kg products
- FANUC M-2iA/3SL: 182 parts/minute for containers
The trade-off: high speed comes at the cost of lower payload capacity. Delta robots excel in high-throughput food processing, pharmaceutical sorting, and packaging applications where items are light and cycle times are short.

Cartesian (Gantry) Robots
Cartesian robots operate along three linear orthogonal axes (X, Y, Z) within a rectangular frame. Their rigid structure delivers excellent positional accuracy and repeatable movements.
Key advantages:
- Well-suited for large workspace coverage (strokes up to 3 m in X/Y)
- Higher payloads than delta robots for three-axis systems
- Simple programming with predictable motion profiles
These robots fit best where consistent linear motion matters more than rotational flexibility — CNC-style transfers, machine loading, and palletizing.
SCARA Robots
SCARA (Selective Compliance Assembly Robot Arm) robots operate across X, Y, and Z axes, but two of their joints rotate. This "selective compliance" gives them strong horizontal movement accuracy and limited vertical motion, combining a compact footprint with high lateral precision.
Common applications include:
- Pharmaceutical blister pack loading and vial handling
- Electronics board assembly and connector placement
- Small precision parts placement in tight cell layouts
Collaborative Robots (Cobots)
Cobots are designed to work alongside human operators, using built-in force-limiting controls to prevent injury — no safety fencing required (under appropriate risk assessment per ISO/TS 15066).
In pick and place contexts, cobots handle repetitive tasks in cells where full automation isn't practical. Yushin America offers the OB7 collaborative robot for injection molding environments — a 7-axis cobot suited for secondary operations, gate cutting, assembly, pack-out, and part handoff in operator-shared workspaces.
Its teach-by-demonstration programming makes it practical for high-mix, changeover-intensive operations without needing a dedicated robotics specialist.
Common Applications of Pick and Place Robots
Pick and place robots are deployed across electronics, food processing, automotive, pharmaceuticals, and plastics manufacturing. The core capability — precise, repeatable object transfer — addresses a near-universal manufacturing challenge.
Assembly
Assembly robots grab incoming parts from conveyors or bins and position them onto other components. Vision-equipped systems handle parts arriving in varying orientations, reducing manual intervention in multi-step assembly sequences. This is particularly valuable in electronics manufacturing, where the IFR World Robotics 2024 report shows electrical/electronics accounted for 23% of global industrial robot installations in 2023.
Packaging
Packaging is one of the highest-volume use cases. Robots pick products from a conveyor or staging area and place them into boxes, trays, or containers at speeds far exceeding manual labor — with no fatigue-related slowdowns across long shifts and no misplacements from distraction.
Bin Picking, Inspection, and Sorting
These three related applications all depend heavily on vision technology:
- Bin picking — retrieves parts from unstructured bins with randomly mixed items using 3D machine vision
- Inspection — picks objects, analyzes them for defects, and removes non-conforming parts
- Sorting — classifies items by size, shape, or color and routes them accordingly
The quality of the vision system directly determines performance in all three.
Injection Molding and Plastics Manufacturing
In plastic injection molding, pick and place robots (called take-out robots or part removal robots) extract freshly molded parts from the mold immediately after each cycle, transferring them to conveyors, cooling stations, or downstream processes.
Timing precision is what separates good performance from lost output here. Plastics Technology notes that reducing demolding time by just one second on a 15-second, 8-cavity cycle can increase annual output by approximately 1 million parts. Robot entry and exit must be fast enough to minimize mold-open time without compromising part integrity.
Yushin America has focused exclusively on this application for over 50 years, building take-out robots for press sizes ranging from 30-ton to 3,000-ton and cycle requirements from sub-3-second IML packaging to heavy-duty automotive part extraction.

Benefits of Pick and Place Robots
Speed and Productivity
Pick and place robots can reach throughput that manual labor simply cannot match. According to the Association for Advancing Automation (A3), pick and place robot throughput can reach up to 200 products per minute, with vision systems capable of identifying 100 products per second on a moving conveyor. Robots also don't require breaks, shift changes, or rest periods — running continuously across multiple shifts.
Accuracy and Consistency
Unlike human workers susceptible to fatigue and distraction, pick and place robots deliver precise, repeatable placement on every cycle across the robot's service life. A3 notes that placement errors can be as small as 0 mm for pick and place robots. This reduces defect rates, rework costs, and product waste — especially valuable in high-value or cosmetic-critical applications.
Workplace Safety and ROI
Automating repetitive, physically demanding handling tasks reduces injury risk. The Bureau of Labor Statistics reported 272,780 musculoskeletal disorder cases in private industry in 2018 — with manufacturing among the top three contributing sectors.
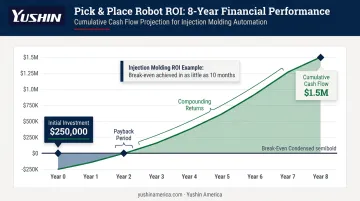
The financial case is equally strong. A3's data puts typical payback at around two years, with returns compounding well beyond that:
- A $250,000 investment can generate roughly $1.5 million in positive cash flow by years 7–8
- Injection molding deployments often see faster returns — A3 cites one collaborative robot adoption that hit ROI in just 10 months
- Lights-out production capability further accelerates payback by extending productive hours without added labor cost
How to Choose the Right Pick and Place Robot
Axes and Range of Motion
Axis count defines flexibility. Operations moving identical items between fixed points need fewer axes and tighter precision. Applications requiring object reorientation need five or six axes minimum. More axes add capability — but also introduce more potential error, so the right choice is the minimum axis count required for the task.
Payload and Reach
Payload is the maximum combined weight of the item being moved plus the end-of-arm tooling. A robot must handle its heaviest item at full arm extension — not just at rest. FANUC notes that payload includes the weight of the end-of-arm tool, dressout, and product.
Reach covers two dimensions:
- Horizontal: from the robot base center to the gripper tip
- Vertical: from the lowest to the highest wrist point
Both must comfortably cover the intended working envelope without the robot overstretching, which degrades repeatability.
Speed and Repeatability
Evaluate speed against peak-demand throughput requirements, not average demand. Spec sheets express speed in degrees per second for articulated arms, or picks per minute for delta and cartesian robots.
Repeatability — the robot's ability to return to and place at the exact same position on every cycle — is equally critical. High-precision applications like electronics or pharmaceutical placement require repeatability within ±0.5 mm or better. Universal Robots publishes repeatability down to ±0.03 mm for their cobot lineup. Always select a robot whose maximum speed and repeatability both exceed minimum operational requirements to build in headroom.
Vision System and Application Flexibility
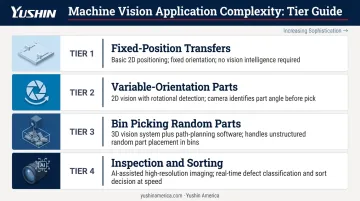
Match vision system sophistication to application complexity:
| Application Type | Vision Requirement |
|---|---|
| Fixed-position transfers, uniform items | Minimal — basic 2D positioning |
| Variable-orientation parts | 2D vision with orientation detection |
| Bin picking, random parts | 3D machine vision + software |
| Inspection and sorting | High-resolution + AI-assisted ID |
Also evaluate programming flexibility — how easily the robot can be reprogrammed when product types, bin sizes, or packaging formats change. In high-mix environments, reprogramming time directly affects how quickly the line recovers when formats change.
Integration, Support, and Total Cost of Ownership
Assess how the robot integrates with existing software systems and physical production lines before purchasing. A sophisticated robot with a steep learning curve or limited local service support can underperform its specifications in practice.
Total cost of ownership should account for: purchase price, integration, end-of-arm tooling, maintenance, operating costs, training, and floor layout changes. A3 evaluates robotic automation savings over a 20-year system life. Purchase price is often a small fraction of total value.
For injection molding specifically, equipment built around molding demands outperforms general-purpose alternatives. Yushin America engineers their robots for cycle synchronization, mold clearance, thermal environments, and downstream integration — requirements that vary significantly from standard pick and place applications.
Frequently Asked Questions
What is a pick and place robot?
A pick and place robot is an automated industrial system designed to pick up objects from one location and deposit them precisely in another. It uses programmed movements, sensors, and end-of-arm tooling to handle repetitive transfer tasks faster and more accurately than manual labor.
Which robot type is ideal for high-speed pick and place due to its parallel link structure?
Delta robots, with their distinctive parallel-link (triangular) arm structure, are built for high-speed, precise pick and place operations. Their configuration enables rapid, lightweight movements, making them a top choice for high-throughput sorting, food processing, and packaging applications.
What industries use pick and place robots?
The most common industries include electronics assembly, food and beverage processing, pharmaceuticals, automotive manufacturing, consumer goods packaging, and plastics/injection molding.
What is the difference between a 5-axis and 6-axis pick and place robot?
A 5-axis robot moves in five directions and handles transfers where objects don't need to be reoriented. A 6-axis robot adds a rotational degree of freedom that allows it to tilt and rotate objects — making it suitable for more complex placements requiring precise orientation adjustment.
What is a take-out robot in injection molding?
A take-out robot is a specialized pick and place robot that extracts molded parts from the mold immediately after each cycle and transfers them to downstream processes. These servo-driven robots are engineered specifically for the cycle timing, reach, and part-handling requirements of injection molding machines.
How much does a pick and place robot cost?
Costs vary widely by type and complexity. Simpler gantry or delta systems can start around $20,000–$30,000, while advanced articulated arm systems or specialized cobots can reach well into six figures. Evaluate total cost of ownership — including installation, training, maintenance, and productivity gains — rather than purchase price alone.


