Auto pallet robots solve this directly. These are compact robotic systems that pick individual cases or bags from an infeed conveyor and build pallet loads in a defined pattern - autonomously, consistently, and without putting workers in the repetitive-lifting loop.
This guide is written for injection molding plant managers, process engineers, and operations leaders evaluating end-of-line automation. It covers how auto pallet systems work in a molding context, what to look for in a palletizing robot for your facility, and where Yushin America's PA Series fits that picture.
Key Takeaways
- Auto pallet robots in injection molding pick packaged parts from a conveyor and stack them onto pallets in automated, repeating patterns - removing the operator from repetitive end-of-line lifting
- The PA-20 and PA-40 from Yushin America are designed specifically for injection molding end-of-line environments, using a compact cantilever structure that preserves floor space
- Palletizing ROI in injection molding facilities comes from three sources: reduced labor cost, fewer repetitive-strain injuries, and consistent throughput across all production shifts
- Key system selection factors include payload capacity, cases per hour, floor footprint, and controller compatibility with your existing production line
- Auto pallet robots are most effective when the operation runs consistent case geometry and moderate-to-high volumes - highly variable, low-volume lines require careful upfront analysis
What Is an Auto Pallet Robot in Injection Molding?
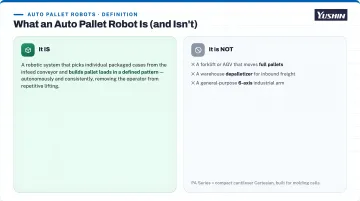
An auto pallet robot is a robotic system that receives packaged output from a production line and builds pallet loads without manual intervention. In an injection molding facility, it typically sits at the end of a conveyor line that delivers boxed, bagged, or tray-packed parts from the molding cell.
The robot identifies each case on the infeed, picks it using an end-of-arm tool (EOAT), and places it in a precise position on the pallet according to a stacking pattern. When the pallet is complete, the system signals for removal and begins the next load.
What Auto Pallet Robots Are Not
It is worth clarifying scope, because the term "auto pallet" is used broadly across industries:
- Auto pallet robots in molding facilities are not automated forklifts or AGVs - those move full, loaded pallets. Auto pallet robots interact with individual cases.
- They are not warehouse depalletizers for inbound freight - the injection molding application is outbound, building loads from finished goods.
- They are not general-purpose 6-axis industrial robots - Yushin's PA Series uses a compact cantilever Cartesian architecture optimized for end-of-line palletizing in space-constrained molding cells.
How Auto Pallet Systems Work in a Molding Facility
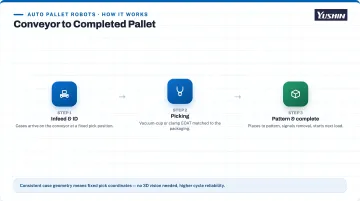
The operational sequence is the same across most systems:
Step 1: Infeed and Case Identification
Packaged parts arrive on a conveyor from the molding cell. Depending on the product, cases may be uniform corrugated cartons, poly bags in trays, or bulk-packed containers. Most injection molding palletizing applications use consistent case geometry, which simplifies infeed and case identification. Yushin palletizing systems can also be engineered for mixed-SKU applications. Vision can be used to identify or verify different products, while multi-part placement allows the system to position more than one product or package format within the palletizing process. For suitable applications, this approach can support mixed-SKU handling without depending on complex 3D vision or unnecessarily complicated pallet-pattern software. The required vision and programming configuration depends on SKU variation, package presentation, infeed consistency, and the required pallet pattern.
For consistent-case applications, the robot uses a fixed infeed position and programmed pick coordinates rather than vision-guided random picking. This simplifies the cell and increases cycle reliability.
Step 2: Picking
The EOAT executes each pick. For injection molding end-of-line applications, the two most common gripper types are:
- Vacuum cup grippers - the standard choice for sealed corrugated cartons, rigid trays, and smooth-surface packaging. Provide clean, mark-free handling.
- Mechanical clamp grippers - used for poly bags, flexible packaging, or cases where vacuum contact area is insufficient.
EOAT selection is matched to the packaging format, not chosen generically. Yushin America's engineering team works with facilities to configure the correct tooling for each application.
Step 3: Pattern Building and Pallet Completion
The robot places each case in a position defined by its stacking pattern software. Yushin's PA-20 and PA-40 integrate automatic pattern calculation into the E-touch controller platform. Operators configure layer patterns through the controller interface, and the system generates the robot program with graphical feedback.
This integration matters in injection molding environments because:
- Mold changeovers sometimes change box dimensions or pack counts
- Production teams - not robotics specialists - need to adjust patterns at changeover
- The E-touch controller is already familiar to molding cell operators running Yushin take-out robots
When a pallet is complete, the system triggers a signal for transport removal and begins building the next load, maintaining continuous throughput without operator intervention.
The PA Series: Yushin America's Palletizing Robots for Injection Molding

Yushin America developed the PA Series specifically for injection molding end-of-line environments. The design reflects what molding facilities actually need: compact footprint, high throughput, and integration with production floor controls.
PA-20 and PA-40: Core Specifications
| Model | Max Payload (including EOAT) | Throughput | Structure |
|---|---|---|---|
| PA-20 | 20 kg | Confirm with Yushin America for application-specific throughput | Compact cantilever |
| PA-40 | 40 kg | Up to 420 boxes/hour | Compact cantilever |
The PA-40 handles payloads up to 40 kg including EOAT weight and can achieve up to 420 boxes per hour, covering many packaged-parts applications in mid-size injection molding operations. Confirm PA-20 throughput and final PA Series sizing with Yushin America based on case format, payload including EOAT, pallet pattern, and line speed.
Cantilever Structure: Why It Matters in Molding Cells
The PA Series uses a cantilever structure with minimal columns. This is a deliberate design choice for molding environments where floor space is shared with presses, conveyors, sprue grinders, and downstream equipment.
Compared to traditional gantry palletizers that require large overhead frames, the PA cantilever design:
- Occupies a smaller footprint around the pallet station
- Leaves floor access clear on three sides for pallet jack and forklift access
- Reduces installation complexity and structural requirements
E-touch Controller Integration
The PA Series runs on Yushin's E-touch controller platform - the same platform used across the YD/YD2, HST, FRA, and other Yushin take-out robot lines. For facilities already running Yushin robots, this means:
- Production teams already know the controller interface
- Service and spare parts come through the same Yushin America support channel
- Integration with upstream take-out robots and conveyors uses familiar communication protocols
Why Injection Molding Facilities Are Automating End-of-Line Palletizing
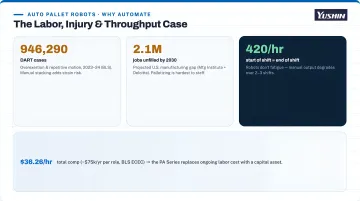
The Labor and Injury Problem
End-of-line palletizing sits at the intersection of two real operational pressures in injection molding: workforce availability and injury exposure.
BLS data shows 946,290 DART cases caused by overexertion and repetitive motion across 2023-2024. Manual case stacking and palletizing can contribute to these injury risks in production environments, especially sprains, strains, and back injuries associated with repetitive heavy lifting.
The Manufacturing Institute and Deloitte projected 2.1 million U.S. manufacturing jobs could go unfilled by 2030. End-of-line palletizing is among the hardest positions to fill and retain because of the physical demands.
Auto pallet robots eliminate the injury exposure entirely and fill shift coverage gaps that would otherwise require overtime, temporary labor, or production slowdowns.
Throughput Consistency Across Shifts
Robots do not slow down. A palletizing robot running at 420 boxes per hour at the start of a shift runs at 420 boxes per hour at the end of it. Manual palletizing performance degrades with fatigue, particularly in facilities running two or three shifts.
Inconsistent manual pallet builds also create unstable loads that generate damage claims and slow receiving at the destination.
The ROI Calculation
Total compensation for production and material-moving roles averages $36.26 per hour according to BLS ECEC data - including wages and benefits, approximately $75,000 annually per full-time position.
A PA Series installation replaces this ongoing labor cost with a capital asset. Common financial structures for palletizing automation in injection molding include:
- Capital purchase - Yushin America's PA Series is sold as a production asset with full Yushin warranty and service support. Most facilities treat this as a long-term capital equipment decision alongside press and take-out robot investments.
- Payback can be attractive in mid-size manufacturing environments where labor rates, overtime, injury risk, and shift coverage challenges are meaningful, but the actual payback period should be calculated from the facility's case volume, labor cost, floor layout, and operating schedule.
Unlike RaaS (Robotics-as-a-Service) models common in third-party logistics and warehouse operations, injection molding facilities typically own their production equipment outright - the PA Series fits that model.
Key Factors That Determine Whether Auto Pallet Robotics Fits Your Operation
Not every injection molding line is ready for automated palletizing. Evaluate these factors before committing to a system:
Technical Fit Factors
| Factor | What to Evaluate |
|---|---|
| Payload | Does the robot's rated capacity cover your heaviest case plus EOAT weight? The PA-40 handles up to 40 kg including EOAT. |
| Cases per hour | Does your line output rate match the palletizer's throughput? At 420 boxes/hour, the PA-40 fits most mid-to-high cavitation molding cells. |
| Case consistency | Uniform case geometry enables faster, more reliable cycles. Mixed-format lines can also be supported with vision-based product identification and multi-part placement, though this typically requires additional engineering and programming considerations at changeover. |
| Ceiling height | Palletizing to standard heights (1.8-2 m) requires vertical clearance above the pallet station. Confirm before designing the cell. |
| Floor space | Measure available space around the pallet station including pallet exchange access. The PA cantilever structure minimizes footprint. |
| Controller compatibility | Facilities running Yushin take-out robots benefit from E-touch integration. Other facilities need to plan for communication protocol setup. |
Conditions That Reduce Palletizing ROI
These situations produce weaker payback on palletizing automation investment:
- Very low daily case volumes - the fixed equipment cost does not amortize well against minimal throughput
- Extreme case variability without engineered configuration - if box dimensions change constantly across products and the system has not been engineered with appropriate vision and multi-part placement capability for that variability, frequent reprogramming can reduce efficiency gains
- Already-efficient manual operations with low turnover - if the manual line runs smoothly and staffing is stable, the economic case is weaker
- Space constraints below minimums - the PA Series has a compact footprint, but some cells genuinely cannot accommodate a palletizer without significant layout changes
The right decision starts with an honest line-rate analysis and footprint assessment - not with a technology demonstration.
Conclusion
Auto pallet robots for injection molding are purpose-built for a specific problem: consistent, unattended end-of-line palletizing in production floor environments where floor space is limited, shift coverage is tight, and production teams cannot be expected to operate complex robotics systems.
Yushin America's PA-20 and PA-40 were developed with that environment in mind. The compact cantilever structure, automatic pattern calculation, and E-touch controller interface make them a practical fit for injection molding facilities that want end-of-line automation to work like the rest of their Yushin equipment - reliably, with support from the same team that handles their take-out robots.
If you are evaluating palletizing automation for your injection molding facility, contact Yushin America to discuss whether the PA Series matches your throughput requirements, case formats, and floor layout.
Frequently Asked Questions
What is an auto pallet robot in injection molding?
An auto pallet robot in an injection molding facility is a robotic system that receives packaged parts from the end of a production line and builds pallet loads without manual lifting. The robot picks individual cases from a conveyor infeed and stacks them onto pallets in a programmed pattern. Yushin America's PA-20 and PA-40 are compact cantilever palletizing robots designed specifically for this application.
How many boxes per hour can a Yushin palletizing robot handle?
The PA-40 can achieve up to 420 boxes per hour and handles payloads up to 40 kg including end-of-arm tooling. PA-20 throughput should be confirmed with Yushin America based on the application. Final palletizer selection depends on case format, payload including EOAT, pallet pattern, available floor space, and required line speed.
What is the difference between a take-out robot and a palletizing robot?
A take-out robot removes molded parts from the mold immediately after the injection molding cycle - it operates inside or adjacent to the mold area and handles individual molded parts. A palletizing robot operates at the end of the production line, after parts have been conveyed, packaged, and prepared for shipping - it handles packaged cases, not individual parts. Yushin America supplies both: take-out robots (YD/YD2, HST, FRA, and other series) and palletizing robots (PA-20, PA-40).
What end effectors does the Yushin PA Series use?
EOAT selection for the PA Series depends on the packaging format. Vacuum cup grippers are the standard choice for sealed corrugated cartons and rigid trays. Mechanical clamp grippers are used for poly bags and flexible packaging where vacuum contact area is insufficient. Yushin America's team works with each facility to configure the right tooling for their specific case formats.
How does the PA Series integrate with Yushin take-out robots already running in my facility?
The PA Series runs on Yushin's E-touch controller platform, which is the same controller family used on YD/YD2, HST, FRA, and other Yushin take-out robot lines. Production teams already familiar with the E-touch interface can operate the palletizer without extensive retraining. Service, spare parts, and technical support all come through the same Yushin America channel as existing take-out robot support.
Can the PA Series handle different box sizes when we change molds?
Yes. The PA-20 and PA-40 include automatic pattern calculation in the E-touch controller. When box dimensions or pack counts change at mold changeover, operators configure the updated pattern through the controller interface and the system generates a new robot program. The graphical interface is designed for production teams, not robotics specialists.
When does auto pallet robotics NOT make sense for an injection molding facility?
Palletizing automation delivers weaker ROI in facilities with very low daily case volumes, case variability that has not been engineered into the system configuration, already-efficient manual operations with stable staffing, or floor layouts that cannot accommodate the system footprint. The decision should start with a line-rate and floor-space assessment, not a technology demonstration.