Introduction
"Collaborative" does not mean "safe without guarding." This is the most important clarification in any discussion of human-robot collaboration in a manufacturing environment, and it applies directly to injection molding cells. Take-out robots at the mold area operate in guarded zones regardless of collaborative capability, because the extraction task itself requires speed and access that collaborative speed limits cannot accommodate safely. This guide covers the practical safety considerations for human-robot collaboration in injection molding - both for guarded take-out robots and for any downstream collaborative robot use.
Why Mold-Area Take-Out Robots Require Guarding
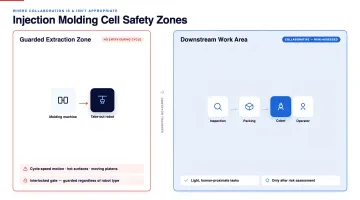
Take-out robots enter the mold space at cycle speed, in an area where hot mold surfaces, clamping mechanisms, and moving platens present multiple hazards independent of the robot itself. Guarding around this area protects operators from:
- Robot motion during the extraction cycle
- The molding machine's own moving parts (clamping unit, mold, ejector system)
- Hot surfaces and residual pressure in the mold area
Because these hazards exist regardless of whether the take-out robot itself has collaborative speed limits, mold-area extraction remains a guarded application. Yushin's FRA Series high-end take-out robots are designed with Safety Category 3 architecture, redundant safety circuits, and speed monitoring specifically for these guarded, safety-critical environments.
What "Collaborative" Actually Means - and Its Limits
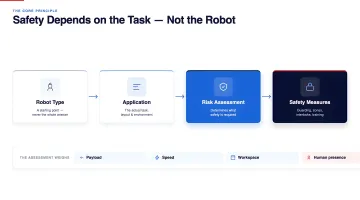
A collaborative robot is designed with speed and force limits that allow closer human proximity than traditional guarded robots, but this capability is task-specific and requires proper risk assessment - it is not a blanket safety guarantee. Key limitations to understand:
- Speed and force limits reduce but do not eliminate risk. A cobot moving within collaborative limits can still cause injury depending on contact point, part geometry, and task specifics.
- Guarding requirements depend on the actual application, not the robot's collaborative rating alone. A formal risk assessment specific to the task, layout, and environment determines what safety measures are actually required.
- Payload and speed limits constrain where cobots can be safely deployed. Applications requiring higher payload, faster motion, or tighter cycle timing may exceed collaborative operating parameters, requiring either different equipment or additional guarding.
Core Safety Practices for Human-Robot Collaboration

Task-Specific Risk Assessment
Before deploying any robot - guarded or collaborative - near human operators, conduct a risk assessment specific to the actual task, layout, and operating environment. This should evaluate contact scenarios, part geometry, robot speed and force at the point of potential contact, and the consequences of unexpected motion.
Safety Zones and Interlocks
Guarded areas around mold-area take-out robots require interlocked gates that prevent robot and machine motion when the gate is open, and prevent the gate from opening during active motion. For collaborative applications, defined safety zones with speed reduction or stopping triggers when a person enters the zone are standard practice.
Emergency Stop Accessibility
Emergency stop controls should be accessible from all operator positions around the cell, clearly marked, and tested regularly as part of routine maintenance procedures.
Speed and Force Monitoring
For guarded high-speed take-out robots, speed monitoring detects abnormal motion that could indicate a developing fault before it becomes a safety event. Yushin's FRA Series includes speed monitoring as part of its Safety Category 3 design.
Operator Training
Operators working near any robot - guarded or collaborative - need training specific to that equipment: normal operating behavior, what constitutes an abnormal condition, emergency stop procedures, and the boundaries of the robot's safe operating zone.
Maintenance Procedures That Preserve Safety Function
Safety circuits, interlocks, and emergency stops require periodic function testing as part of preventive maintenance - not just initial installation verification. A safety system that has degraded over time without detection provides false assurance.
Where Cobots May Support Downstream Tasks - With Proper Risk Assessment
Collaborative robots can support certain downstream, human-proximate tasks in an injection molding facility - light packing assistance, inspection support, operator-assist repetitive work - but only after task-specific risk assessment confirms the application is appropriate for collaborative operation. This is not a default assumption; it is a determination made for the specific task, robot model, and environment.
Yushin Solutions for Guarded, Safety-Critical Applications
| Safety requirement | Yushin solution |
|---|---|
| Mold-area extraction with formal safety certification | FRA Series high-end take-out robots - Safety Category 3, redundant circuits, speed monitoring |
| Standard guarded take-out | YD/YD2 Series standard take-out robots |
| High-speed guarded extraction | RC-SE high-end high-speed take-out robot |
Selection and Implementation Checklist
- Identify the actual hazards present, not just the robot's collaborative rating
- Conduct a documented risk assessment for each specific task and layout, including any changes to the cell over time
- Confirm applicable safety standards for your equipment and application (e.g., EN/ISO 12100, EN 60204, EN/ISO 10218)
- Verify interlocks and emergency stops function correctly as part of routine maintenance, not just at installation
- Train operators on the specific equipment and zone boundaries they will work near
- Reassess safety measures whenever the cell layout, task, or equipment changes
When Additional Safety Engineering Review Is Needed
- New insert loading or overmolding applications: Adding servo wrist orientation capability or new EOAT changes the robot's motion profile and may require updated risk assessment.
- Cell layout changes: Moving equipment, adding downstream stations, or changing operator workflow patterns should trigger a safety review.
- Any near-miss or incident: Should prompt an immediate review of the relevant safety measures before resuming normal operation.
Implementation and Support
Yushin America provides installation, safety system support, operator training, field service, and parts support for take-out robot systems across North America.
- 24/7 phone support: 888-707-6268
- Over $1.3M in spare parts inventory with overnight shipping
- Yushin University: Yushin robot training and programming
- Yushin America field service and support
Frequently Asked Questions
Does a collaborative robot rating mean guarding is not required? No. Collaborative rating means the robot is designed with speed and force limits that support closer human proximity in appropriate applications, but guarding requirements depend on a task-specific risk assessment - not on the collaborative rating alone.
Why do take-out robots require guarding even in a "smart manufacturing" facility? Take-out robots operate inside the mold area at cycle speed, alongside hazards from the molding machine itself - hot surfaces, clamping mechanisms, moving platens. These hazards exist independent of the robot's own safety features, requiring a guarded zone regardless of collaborative capability.
What does a task-specific risk assessment actually evaluate? It evaluates the actual contact scenarios possible in the specific task and layout, the robot's speed and force at the point of potential contact, part geometry, and the consequences of unexpected motion - not just the robot's general safety rating.
How often should safety interlocks and emergency stops be tested? As part of routine preventive maintenance, not just at initial installation. Safety circuits can degrade over time without visible signs, so periodic function testing is necessary to confirm they still work as intended.
Can a cobot safely work in the same cell as a guarded take-out robot? Potentially, if the cobot's task is downstream and separated from the mold-area extraction zone, and a task-specific risk assessment confirms the layout and interaction points are safe. This requires deliberate cell design, not an assumption based on either robot's general safety rating.
What safety standards apply to take-out robots in injection molding? Relevant standards include EN/ISO 12100 (general machinery safety), EN 60204 (electrical safety), and EN/ISO 10218 (industrial robot safety). Yushin's FRA Series is designed with these standards in mind, including Safety Category 3 architecture and redundant safety circuits.
Conclusion
Human-robot collaboration in injection molding requires understanding the difference between a robot's collaborative capability and the actual safety requirements of a specific task. Mold-area extraction remains a guarded application regardless of robot type, and any downstream collaborative robot use requires proper, task-specific risk assessment - not an assumption of automatic safety.
If your molding cell needs a safety review for take-out robot integration, cell layout changes, or downstream automation planning, contact Yushin America to discuss the right guarded automation and safety configuration for your production environment.